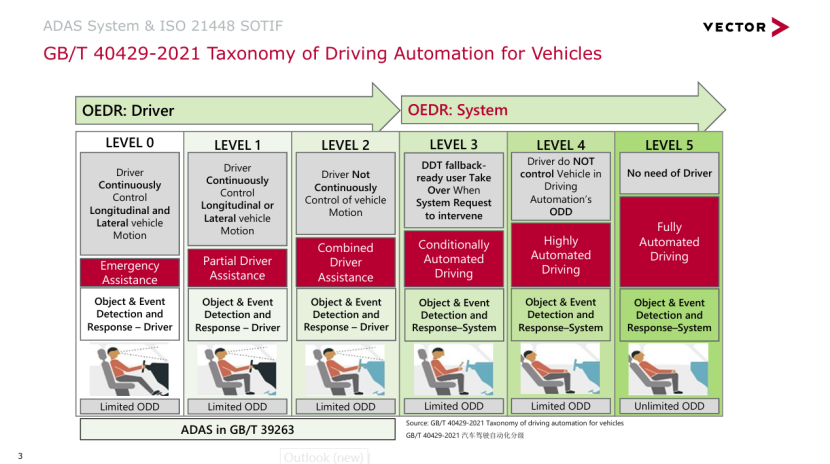
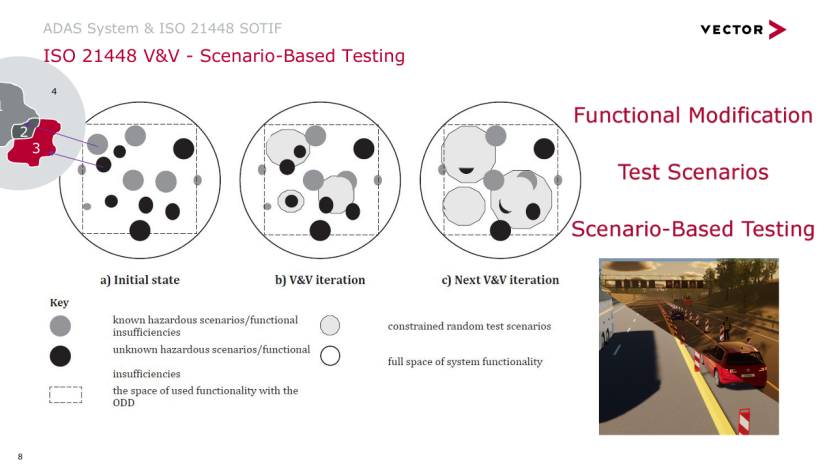
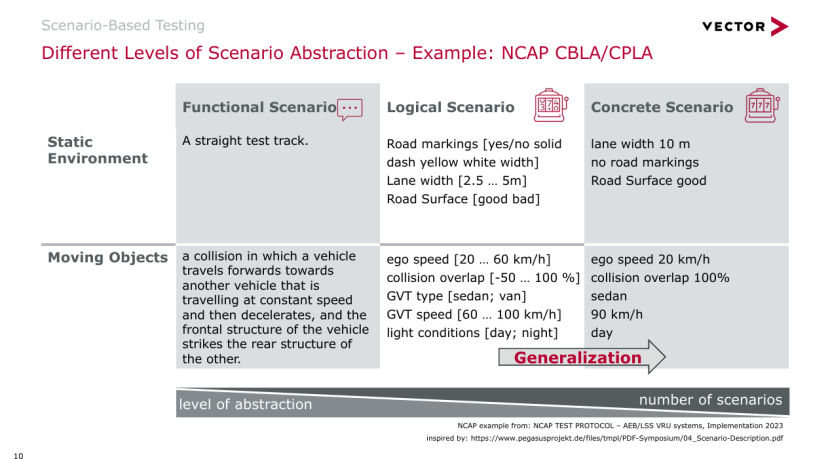
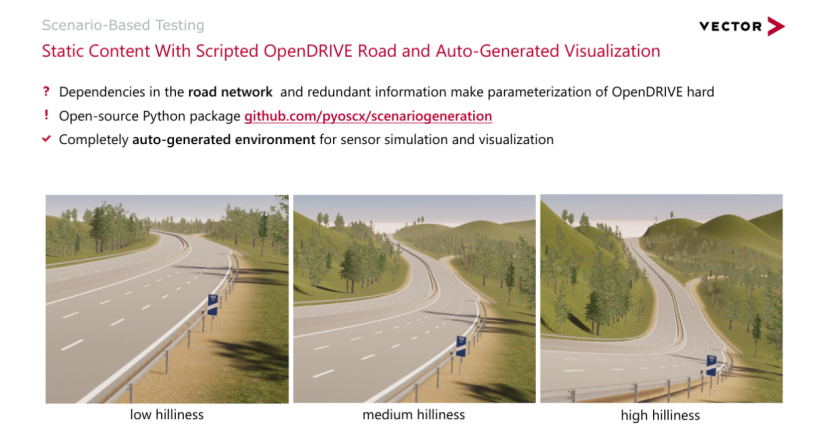
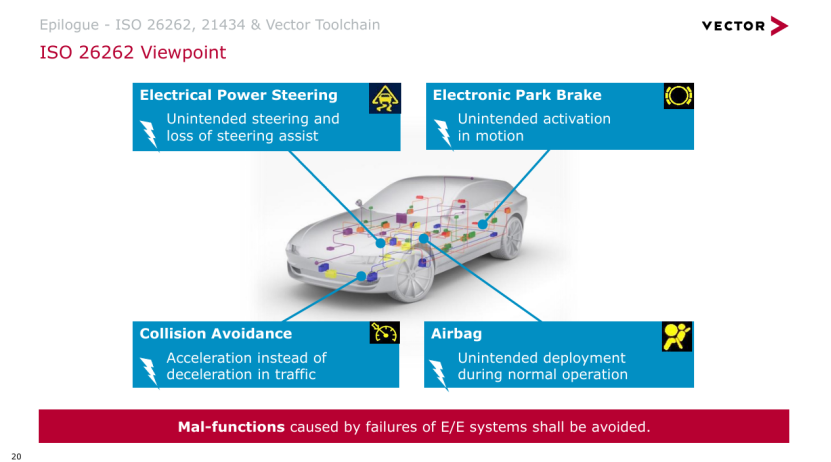
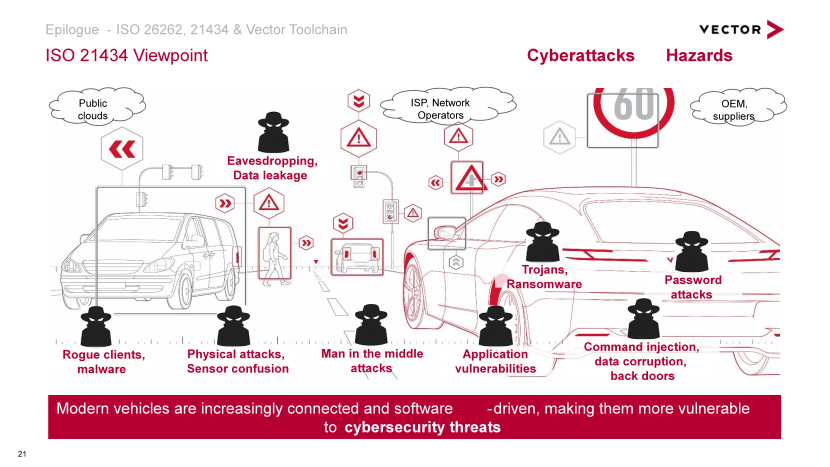
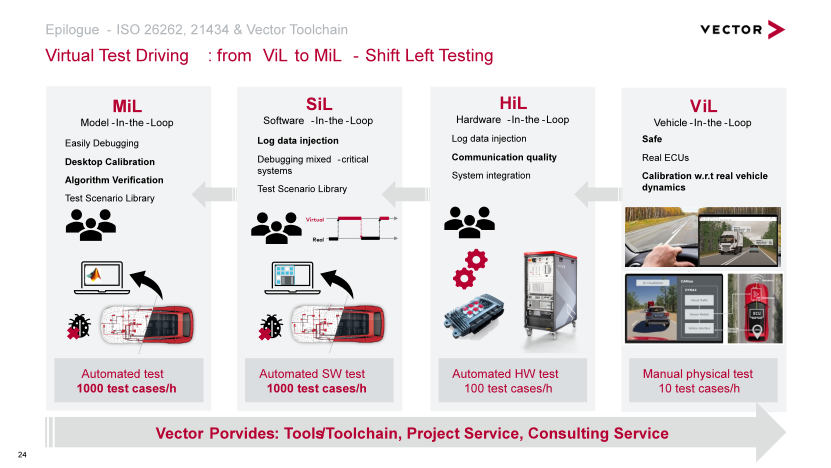
The rapid development of driving automation technology has significantly expanded vehicle functionalities and improved performance, but it also raises higher demands for road safety, especially in complex traffic scenarios where insufficient functionality may lead to unforeseen risks. The ISO 21448 expected functional safety standard serves as a core framework that ensures these risks remain controllable through systematic activities covering system definition, development, and testing verification. From this standard, three key concepts can be derived: the desired system represents a zero-accident perfect state, the specified system serves as the engineering definition, normative baseline, and design, while the implemented system is the final product realized in practice. These three concepts are interrelated yet objectively different, implying that discrepancies exist between the defined and implemented systems in engineering practice, which can manifest as functionality insufficiencies or defects, thus creating sources of risk. SOTIF emphasizes comprehensive process management, including scenario definition, risk identification, and closed-loop verification, providing the industry with a practical technical path aimed at eliminating unreasonable risks arising from functional insufficiencies, thereby compressing the proportion of hazardous scenarios to within a safe threshold. On July 22, 2025, Guang Mingxi, Business Development Manager at Vector, stated at the 8th Intelligent Driving Assistance Conference, 'Scenario-Based Testing is the key pathway to achieving SOTIF goals. Through iterative scenario expansion, risk identification, system modification, and closed-loop verification, unreasonable risks caused by functional insufficiencies can be effectively eliminated, ensuring functionalities meet safety release criteria.' This view stems from the practical use of Vector's toolchain, supporting multi-level testing from model-in-loop to real vehicle-in-loop, establishing and continuously expanding a testing scenario library through scenario analysis and generalization, with some test cases and environments being reused across different stages and levels to ensure the reliability and efficiency of the verification process. The core logic of expected functional safety as outlined in the ISO 21448 standard states, 'The safety of road vehicles is the primary concern of the road vehicle industry,' emphasizing that a core objective of driving automation systems (covering all levels from L0 to L5) is to universally reduce traffic accident rates, especially minimizing casualties caused by human errors. The standard highlights three key concepts: the desired system, specified system, and implemented system, which collectively address the gaps and potential risks associated with system performance in specific scenarios. The essence of SOTIF is to eliminate unreasonable risks caused by functional insufficiencies, defined as the absence of unreasonable risks stemming from hazardous behaviors due to functional shortcomings. By utilizing a four-quadrant model of scenarios, driving automation systems can categorize scenarios into known safe regions, known dangerous regions, unknown dangerous regions, and unknown safe regions, with the core verification goal being to progressively identify and eliminate functional insufficiencies through iterative activities, thereby compressing the proportions of known and unknown dangerous scenarios to within safe thresholds. In the context of testing methods, significant trends have emerged, including simulation testing that supports all-weather simulations and validations, the use of widely accepted standardized scene files for static and dynamic road models, and the development of generalized techniques that automate the generation of numerous specific scenarios from logical scenario libraries, enhancing coverage. As the complexity of driver assistance systems increases, particularly in multi-sensor fusion scenarios, inadequate scenario coverage has become a key technical bottleneck, leading to insufficient functional verification and unreasonable residual safety risks. The industry is encouraged to build and share a scenario library ecosystem, focusing on critical areas such as establishing a dangerous scenario data sharing mechanism, developing AI-driven scenario generation engines, and formulating standards for typical Chinese road scenarios. The introduction of machine learning and AI technologies presents both opportunities and challenges for the development of driving automation, and the upcoming ISO 8800 standard on road vehicle safety and artificial intelligence, set for release in 2024, merits attention as it pertains to the development and verification processes of L3 and above automated driving. Vector continues to enhance its product offerings, providing a complete solution that includes software and hardware development and testing tools, customized local project services, and consulting support for ISO 26262/21434/SOTIF standards, helping the industry improve the efficiency of developing and verifying driving automation functionalities, ultimately achieving the core goal of 'making driving safer.'
Advancements in Driving Automation Technology and the Importance of ISO 21448 Standards

Images
Share this post on: