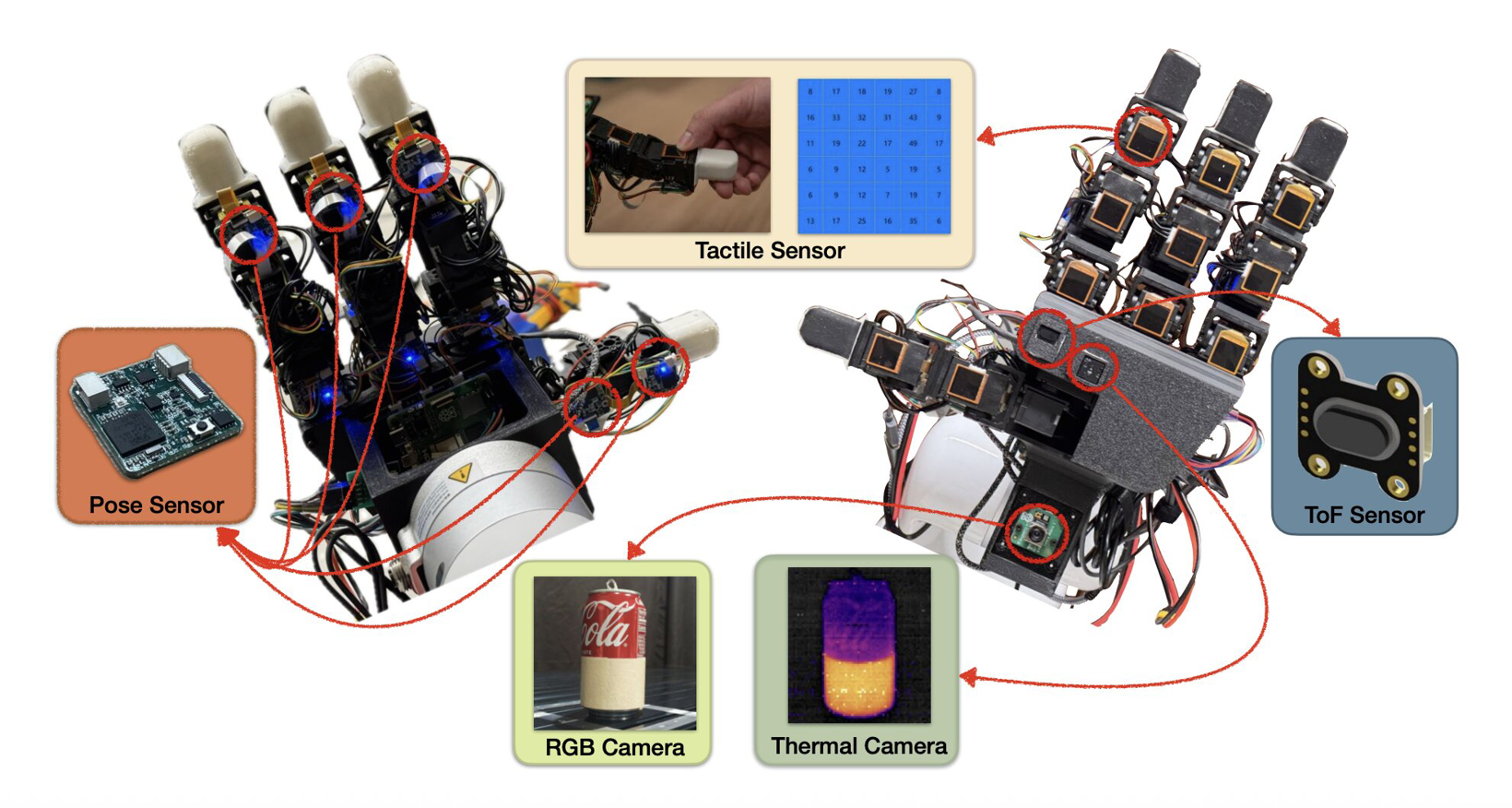
Despite advancements in robotics over the past few decades, most existing robots still struggle to manipulate objects with the same flexibility and perception as humans. This limitation adversely affects their performance in various real-world tasks, from household chores to debris cleanup after natural disasters, as well as assembly or maintenance tasks, especially in high-temperature environments such as steel mills and foundries where heat significantly reduces performance and the precision required for safe operation. According to reports, researchers at the University of Southern California have recently developed a new robotic hand called MOTIF (Multimodal Observation with Thermal, Inertial, and Force sensors), which aims to enhance the object manipulation capabilities of humanoid robots. This innovative achievement was published in a paper on the arXiv preprint server and employs a variety of sensor devices, including tactile sensors, depth sensors, thermal cameras, inertial measurement unit (IMU) sensors, and visual sensors. "Our paper stems from the need for robotic manipulation that goes beyond traditional visual and tactile perceptions," said researchers Daniel Seita, Hanyang Zhou, Wenhao Liu, and Haozhe Lou. "Current multi-fingered robotic hands often lack the integrated sensory capability required to perform complex tasks such as thermal sensing and sensitive contact feedback." The main goal of this research is to develop a new multifunctional, multimodal robotic hand inspired by the human hand, capable of safely and accurately handling objects. By leveraging more comprehensive sensor inputs, the robotic hand they created can perform more detailed object interactions across various environments, from homes to factories.
USC Researchers Develop Advanced Robotic Hand to Improve Object Manipulation
Share this post on: