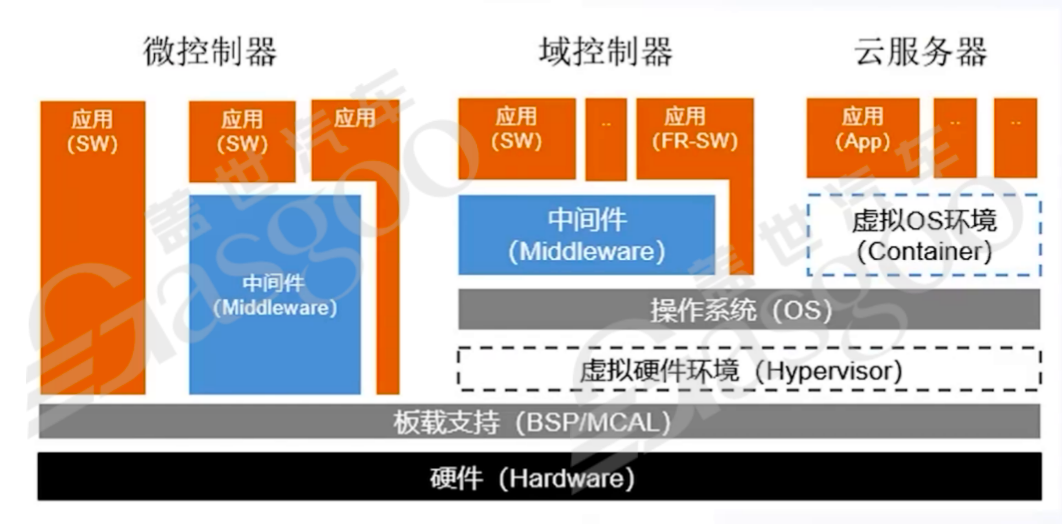
The foundation of automotive hardware and software integration is based on a layered architecture. The core of the hardware layer comprises System on Chip (SoC) that integrates processing units such as GCPU, DSP, and GPU, along with storage and auxiliary chips, forming the computational foundation for vehicles. Above this hardware layer are various controllers that implement core functions relying on the underlying hardware. Functional safety design is critical in hardware architecture, typically featuring lock-step designs that meet the highest safety standards (SLD). The Board Support Package (BSP) serves as a bridge between hardware and software, standardizing kernel calls and connecting different layers of software.
In terms of software architecture, the operating system (OS) layer includes various types of OS like Linux and QNX, managing hardware resources and providing a runtime environment. Middleware acts as an intermediary, simplifying application development by encapsulating complex hardware operations. The virtual layer, composed of Hypervisor and Container environments, allows for efficient and secure multi-OS operation on the same hardware.
The application layer operates on typical design patterns (L1, L2, L3), primarily focusing on monitoring and triggering functional safety systems when anomalies are detected.
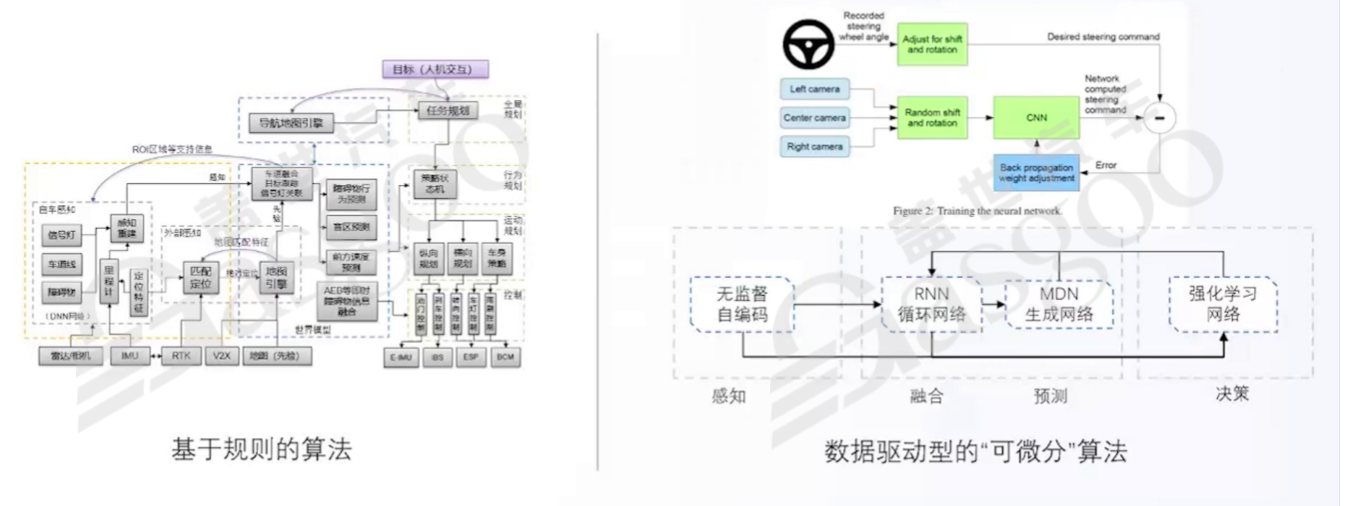
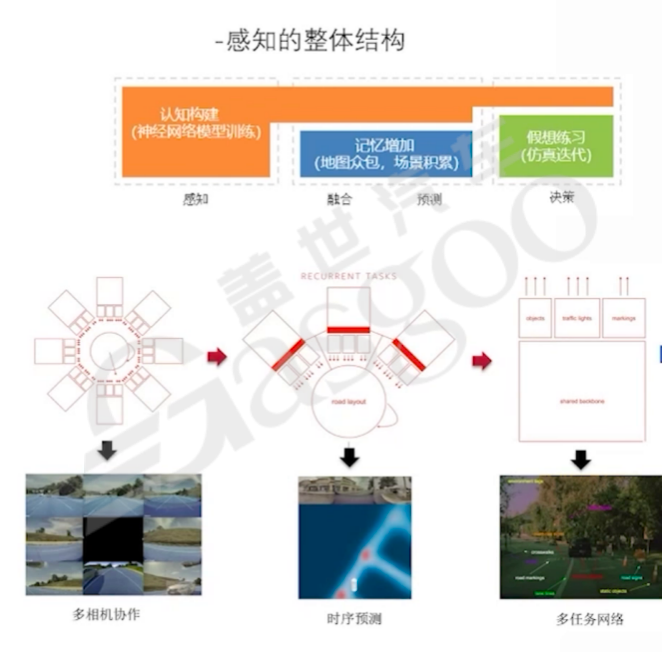
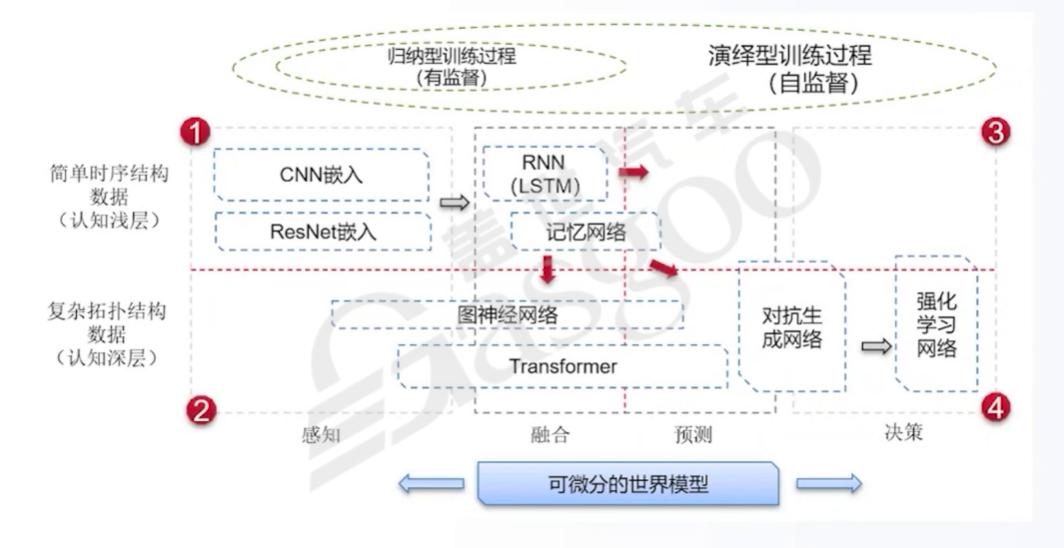
Regarding algorithms, rule-based algorithms operate on predefined logic and are less structured, leading to variability under different conditions. In contrast, data-driven algorithms, particularly neural networks, offer consistent performance and stability, making them preferable for perception tasks.
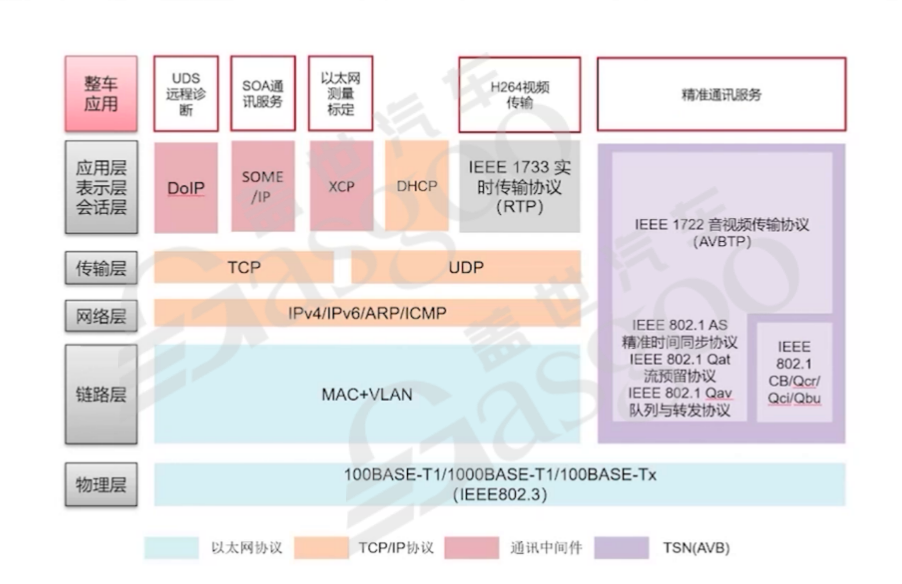
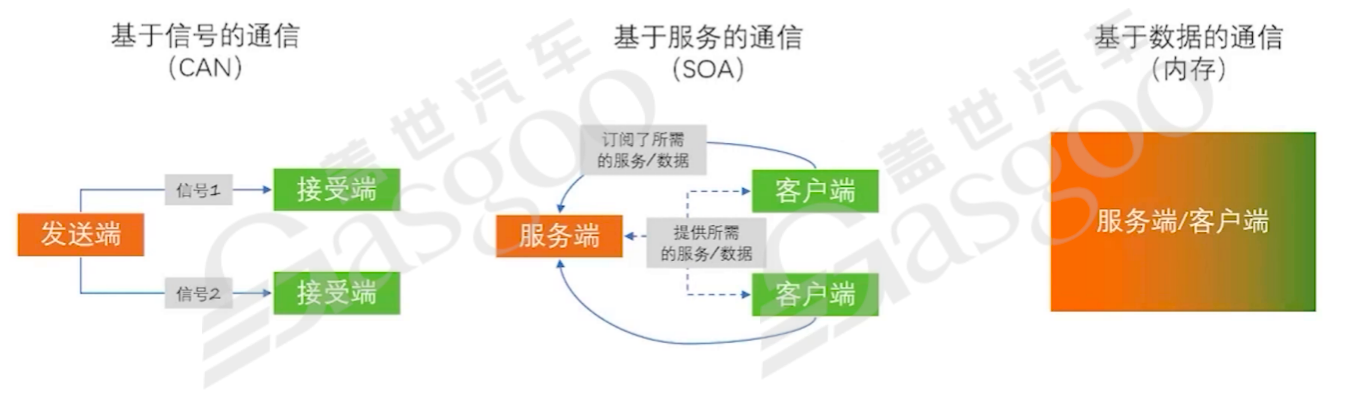
The communication scheduling mechanism is crucial, with Time-Sensitive Networking (TSN) providing high stability through precise task scheduling, while traditional TCP/IP-based methods offer flexibility but potential instability. The future trend is towards network modeling to balance flexibility and stability in communication.
Finally, sensor modeling is vital for the performance of algorithms, and precise models enhance the effectiveness of perception methods in autonomous driving, such as Dense Prediction and Proposal-Based methods. The automotive application layer is evolving rapidly, emphasizing the integration of software and hardware, intelligent algorithms, and network models to improve vehicle safety, reliability, and overall intelligence.
Technological Framework of Automotive Software and Hardware Integration
Images
Share this post on: