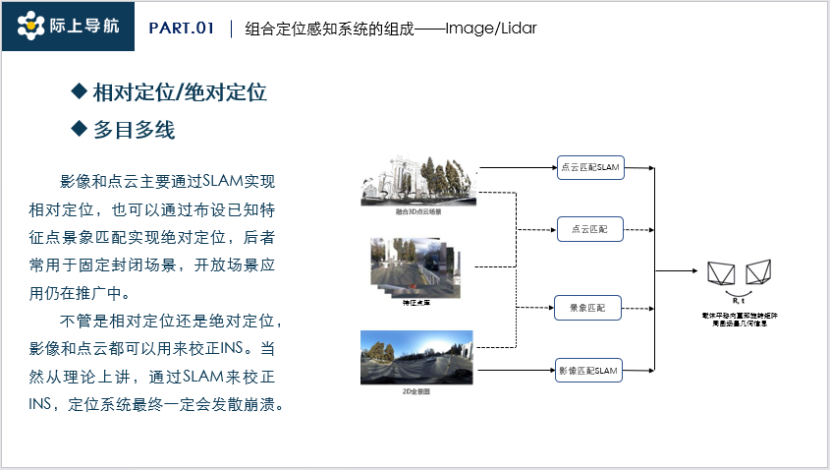
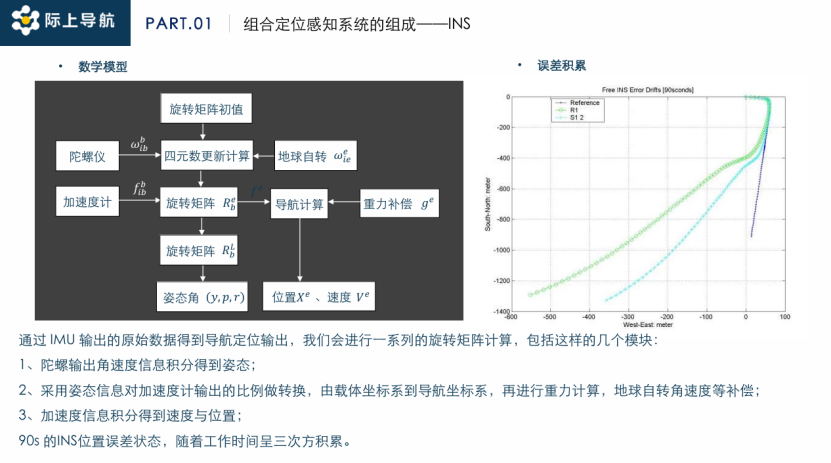
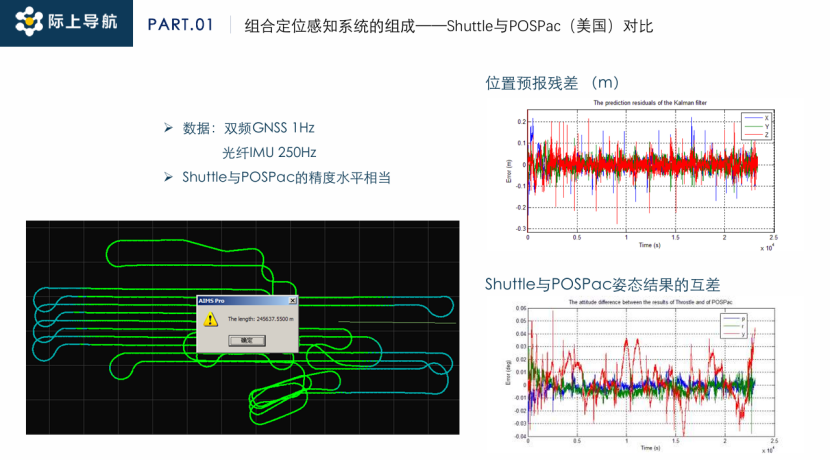
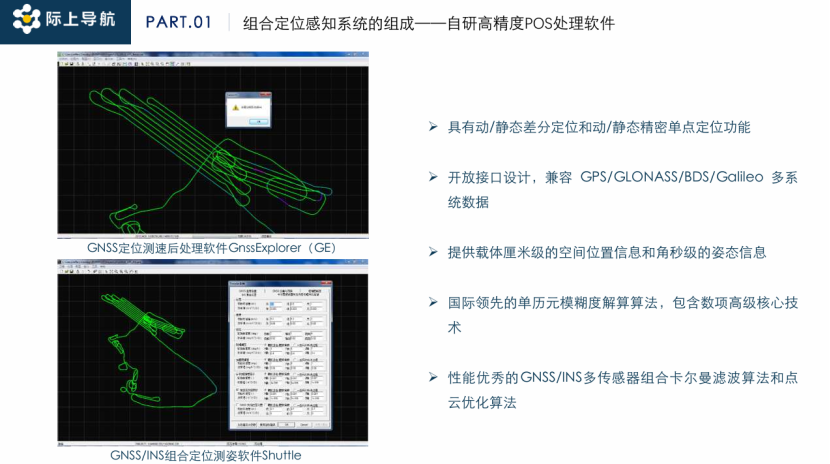
High-precision integrated positioning technology serves as the core support for assisted driving systems, evolving to address three key contradictions: the demand for continuous positioning in satellite denial scenarios versus the accumulation of inertial navigation errors; the need for low-cost mass production versus fiber-optic level accuracy; and the complexity of open road environments versus the divergence risks of SLAM technology. Since the establishment of the first high-precision integrated positioning team in China in 2000, the technology has progressed through three phases: the early phase (2000-2006) achieved centimeter-level dynamic positioning through breakthroughs in GNSS/INS tightly coupled algorithms; the development phase (2007-2020) integrated LiDAR and visual sensors, innovatively bringing SLAM technology into the integrated positioning framework; and the innovation phase (2021-present) proposed the theory of 'five-source heterogeneous elastic deep integration,' achieving continuous centimeter-level positioning for 30 minutes in underground parking lots through deep coupling of GNSS/INS/wheel speed sensors/LiDAR/visual sensors in Wuhan Economic Development Zone. However, the SLAM system still faces divergence risks that need to be mitigated by a feature point library. Current technological bottlenecks focus on enhancing adaptability to all-domain scenarios and controlling costs, with the cost of fiber-optic gyroscopes needing to be reduced by 60% to meet the mass production demands for L4 level assisted driving. On July 22, 2025, the general manager of Wuhan Jishang Navigation Technology Co., Ltd. emphasized at the 8th Intelligent Assisted Driving Conference that 'the elastic deep integration technology based on multi-source heterogeneous sensors is the key path to breaking through the safety bottleneck of assisted driving in satellite denial environments and urban canyon scenarios.' The core positioning requirements for assisted driving systems include: centimeter-level positioning accuracy with horizontal positioning error ≤ 5cm and attitude control accuracy reaching a few thousandth of a degree; high reliability demands that the system output deviation does not exceed safety thresholds during 30 minutes of continuous operation; high availability must adapt to complex scenarios such as GNSS denial on closed roads, multipath interference on open roads, and total signal failure in underground spaces; and functional safety relies on an autonomous integrity detection mechanism, avoiding accident risks through dual guarantees of false alarm rates < 10⁻⁵ and missed alarm rates < 10⁻⁷. The implementation of these technologies relies on a six-source deep integration architecture of GNSS/INS/LiDAR/visual/wheel speed sensors/motion constraints. Current technology routes integrate six types of sensors: Inertial Navigation (INS) measures angular velocity and linear acceleration through gyroscopes and accelerometers, with MEMS devices reducing volume by 80% and cost controlled at 50 levels, but positioning error accumulates cubically over time. Fiber-optic gyroscopes achieve milliradian-level attitude precision but are costly, needing to be reduced by over 60% to meet mass production demand. Satellite positioning uses dual-frequency/triple-frequency multi-constellation systems, enhancing horizontal accuracy to ±2cm through RTK differential positioning technology, providing a global absolute coordinate reference for the system. LiDAR achieves environmental perception and relative positioning through real-time mapping and point cloud matching, while cameras capture texture information to assist feature matching. Wheel speed sensors output high-frequency pulse vehicle motion data at 200Hz, forming a spatiotemporal complementary system in combination with vehicle integrity constraints. The core technology breakthrough lies in the multi-source heterogeneous elastic deep integration model: a tightly coupled algorithm based on extended Kalman filtering deeply integrates raw satellite observations, IMU inertial data, and wheel speed pulse information, achieving sensor-level deep interaction and 10ms-level multi-source data synchronization on mass production domain control platforms. Dynamic weight allocation technology adjusts sensor confidence based on signal quality in real-time, automatically boosting LiDAR and visual weights within 300ms of GNSS loss of lock, ensuring continuous positioning capabilities in scenarios such as 60 seconds of uninterrupted passage through tunnels and 30 minutes of precise positioning in underground parking. The core algorithm has achieved centimeter-level trajectory retention in the intelligent connected testing field of Wuhan Economic Development Zone. The software platform Shuttle achieves deep integration of dual-frequency GNSS (compatible with GPS/GLONASS/BDS/Galileo multi-systems) and fiber-optic IMU 250Hz data, providing centimeter-level spatial position information and angle second-level attitude information through internationally leading single epoch ambiguity resolution algorithms and high-performance GNSS/INS multi-sensor combination Kalman filtering algorithms. Performance in practical tests rivals international benchmarks—compared to NovAtel's POSPac in Canada, actual measurement shows position forecast residuals can be controlled within ±2cm; attitude calculation accuracy shows roll angle discrepancies in certain scenarios to be less than 0.01°, overall matching international benchmarks; in the same testing scenario, the attitude output difference curve of both is highly consistent. Core technology breakthroughs are reflected in point cloud optimization algorithms and joint calibration of POS/camera eccentric parameters, with eccentric angle residuals controlled within ±0.005°, providing foundational support for multi-sensor spatiotemporal synchronization. This platform has been applied in the gTruth ground truth evaluation system, achieving centimeter-level trajectory reproduction in the intelligent connected testing field of Wuhan Economic Development Zone. The technical transformation has formed a four-product matrix: high-reliability positioning units gSpin series covering MEMS-level to FOG-level solutions, with gSpin110 costing less than 50 USD to meet L2+ assisted driving needs, and gSpin610 achieving fiber-optic level precision of 0.003° for ground truth acquisition systems; unmanned intelligent perception systems gMove integrating GNSS/IMU/UWB technologies provide centimeter-level positioning for port AGVs and lawnmowers; automated driving domain control solutions gThrostle solve positioning issues in signal loss scenarios like parking lots through deep coupling algorithms and high-precision map feature matching; and the ground truth evaluation system gTruth integrates LiDAR and panoramic cameras, achieving microsecond-level spatiotemporal synchronization precision, applied to algorithm evaluations for multiple automotive companies. In terms of mass production implementation, Wuhan Jishang is synchronously providing sensor calibration services, achieving calibration errors less than 0.05° for LiDAR and camera extrinsic parameters, and completing target deployment projects for multiple intelligent connected testing fields. Future challenges and development paths face three technical barriers: the cost of fiber-optic level IMUs needs to be reduced by over 60% from the current 5000 level, but quick error accumulation makes it difficult to undertake heavy responsibilities. The construction of a global feature point library for open scenarios still requires breakthroughs to overcome the systematic divergence risks of SLAM technology; while the reliability of closed scene feature point libraries has been validated, adaptability to open roads is insufficient. The industry has yet to establish unified standards for integrated positioning, leading to a lack of interoperability and safety assessment systems. Wuhan Jishang Navigation emphasizes that the feature point library for closed scenes is key to ensuring reliability, and will focus on developing AI-driven dynamic feature extraction technologies and promoting testing standard construction in collaboration with the Integrated Positioning Committee of the China Satellite Navigation Association. As domain control solutions become more widespread, multi-source heterogeneous sensor deep integration technology is expected to achieve a cost-effective solution at the thousand-yuan level by 2027, providing a technical foundation for centimeter-level continuous positioning for L4 level assisted driving.
High-Precision Integrated Positioning Technology as Core Support for Assisted Driving Systems

Images


Share this post on: