This article discusses cross-domain time synchronization technology, which serves as the time benchmark for the full chain of "perception-decision-execution-interaction" in smart vehicles. It introduces mainstream synchronization technologies such as PTP, gPTP, and CAN, highlighting their characteristics. Using the Hezhisima Intelligent Wudang C1296 chip as an example, the article demonstrates the practical effects of achieving high-precision alignment across multiple domains through various synchronization methods, thus eliminating the clock trust gap. The core of smart vehicles is to achieve assisted driving and intelligent interaction through multi-dimensional perception, real-time decision-making, and precise control, all of which rely on a consistent time benchmark. Given the different frequencies and mechanisms of data collection from various sensors, accurate data fusion and control feedback can only occur under a unified time benchmark. Inconsistent time benchmarks can lead to errors in environmental perception, target tracking chaos, incorrect control commands, and system coordination confusion. Time synchronization technology may seem basic, but it is the "invisible framework" that ensures the safe and efficient operation of smart vehicles.
Time Synchronization: The "Invisible Clock Manager" of Distributed Systems
Time synchronization technology refers to the system of technologies that keeps the clock benchmarks of multiple independent systems, devices, or nodes consistent (or within an acceptable error range) through hardware, protocols, or algorithms. Its core aim is to eliminate "time offsets" from different clock sources, ensuring that data collection, transmission, and processing are effectively correlated in a "unified time dimension." In terms of precision, time synchronization technology can cover needs from milliseconds (ms) to nanoseconds (ns). Common implementation methods include:
- Satellite timekeeping (e.g., GPS, Beidou, providing absolute time benchmarks with an accuracy of tens of nanoseconds).
- Network protocol synchronization (e.g., NTP for millisecond-level synchronization, PTP/IEEE 1588 for microsecond to nanosecond-level synchronization).
- Hardware clock calibration (e.g., correcting drift through oscillators and algorithms to ensure short-term stability).
The Role of Time Synchronization in Smart Vehicles: A Core Technology Foundation
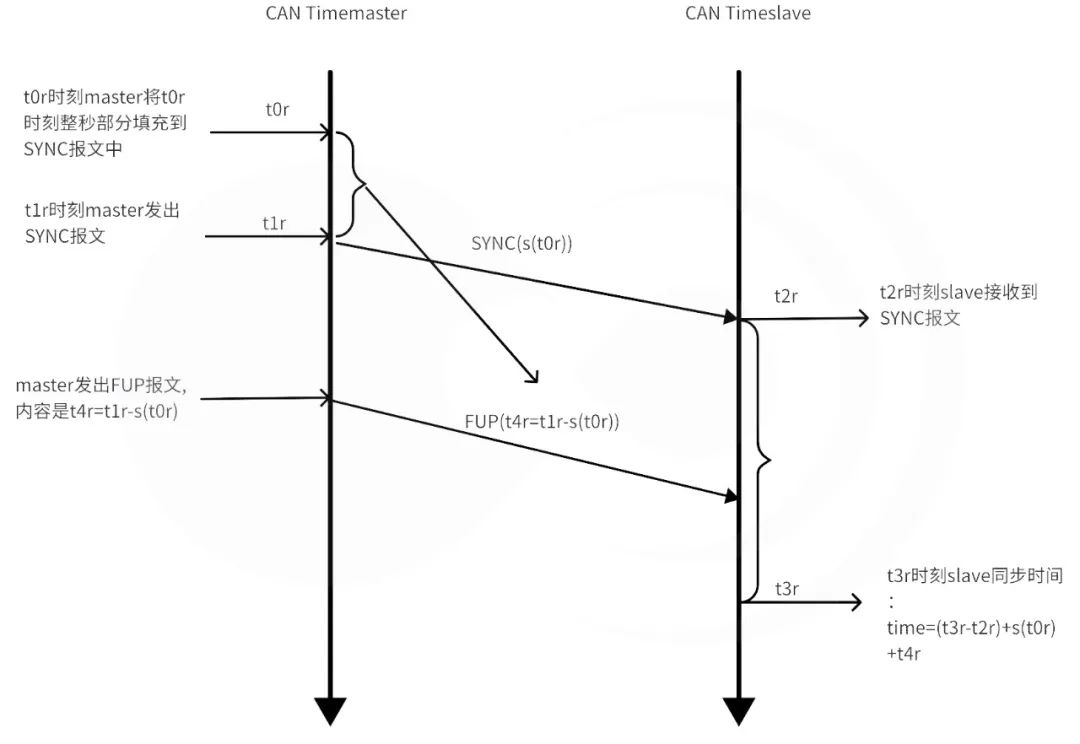
Smart vehicles are complex systems characterized by "multi-sensor fusion + vehicle-to-everything (V2X) interaction + assisted driving decision-making." Time synchronization technology serves as the "time benchmark anchor" for the entire "perception-decision-execution-interaction" chain. Internally, it ensures the accuracy of multi-sensor data fusion, avoiding perception errors caused by time offsets; externally, it supports the reliability of V2X interactions, ensuring the real-time and effectiveness of information exchange. For safety, it provides the "temporal guarantee" for assisted driving decision-making and execution, directly affecting the safety of vehicles and pedestrians. Specific roles manifest in the following scenarios:
- Ensuring the accuracy of multi-sensor data fusion
- Guaranteeing the reliability of V2X interactions
- Supporting high-precision positioning and path planning
- Enhancing the safety of assisted driving decision-making and execution
- Meeting compliance requirements for data recording and traceability.
Typical Applications of Time Synchronization Technology in Smart Vehicles
Common time synchronization technologies include: PTP (Precision Time Protocol), gPTP (Generalized PTP), CAN (Controller Area Network) time synchronization, ToD/PPS (Time of Day/Pulse Per Second), and NTP (Network Time Protocol).
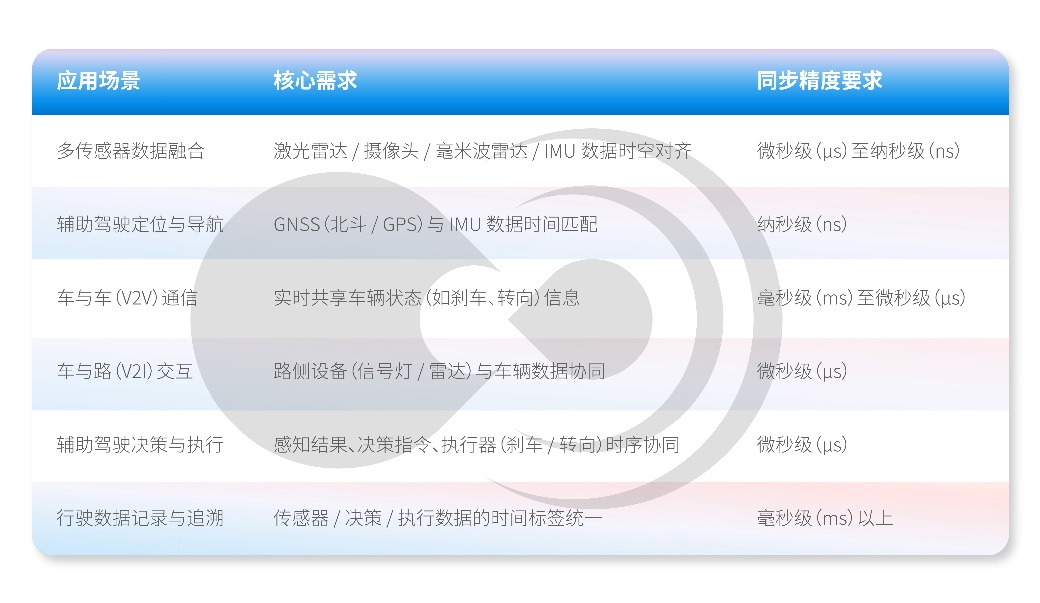
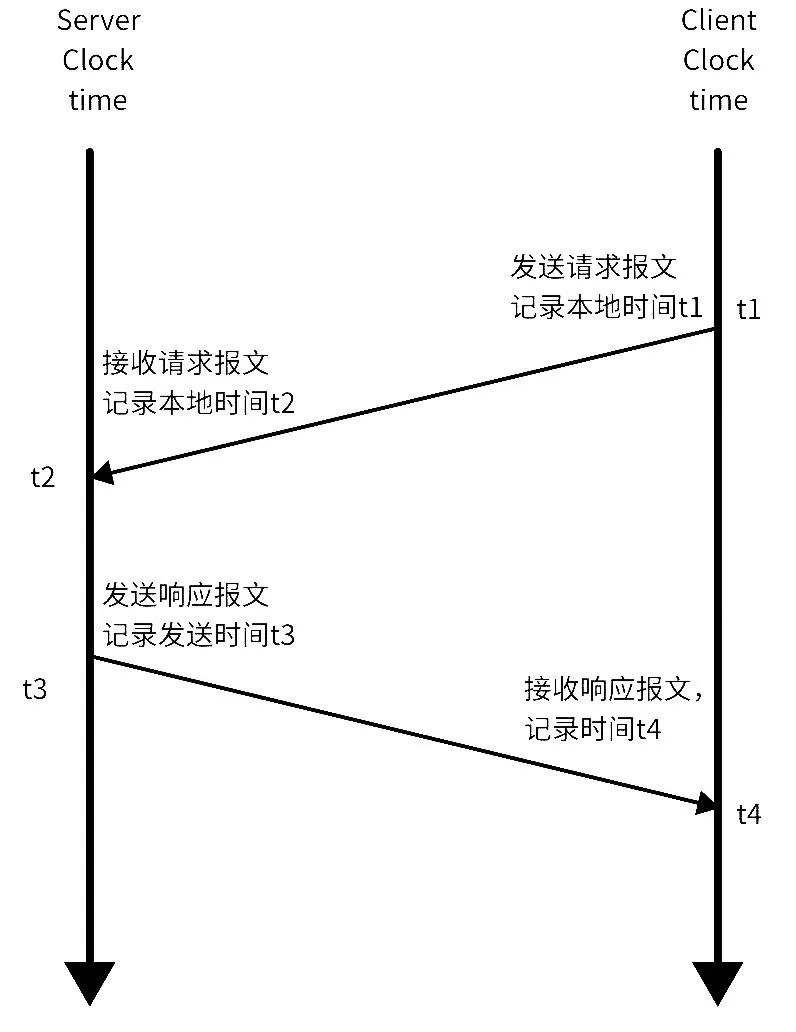
PTP is based on the IEEE 1588 standard, achieving nanosecond-level time synchronization through timestamp exchanges between master and slave nodes. The PTP synchronization process involves four handshake steps to calculate time offsets and link delays. The main mechanisms include boundary clocks (BC) and transparent clocks (TC). PTP is commonly used in industrial automation, power systems, and audio-visual synchronization.
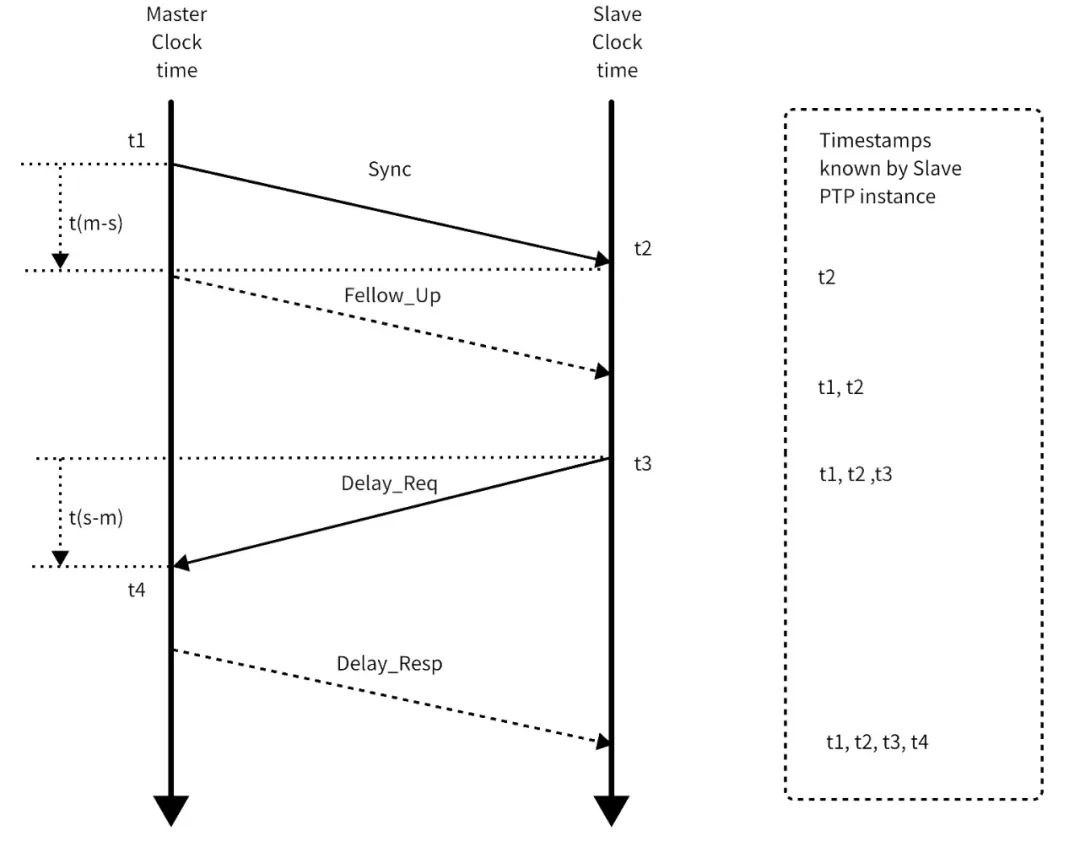
gPTP is based on the IEEE 802.1AS standard, designed for time-sensitive networks (TSN), optimizing synchronization efficiency in low-latency scenarios. gPTP's key technologies include Peer Delay mechanisms and TDMA scheduling. It is widely used in in-vehicle Ethernet, industrial IoT devices, and real-time audio-video transmission.
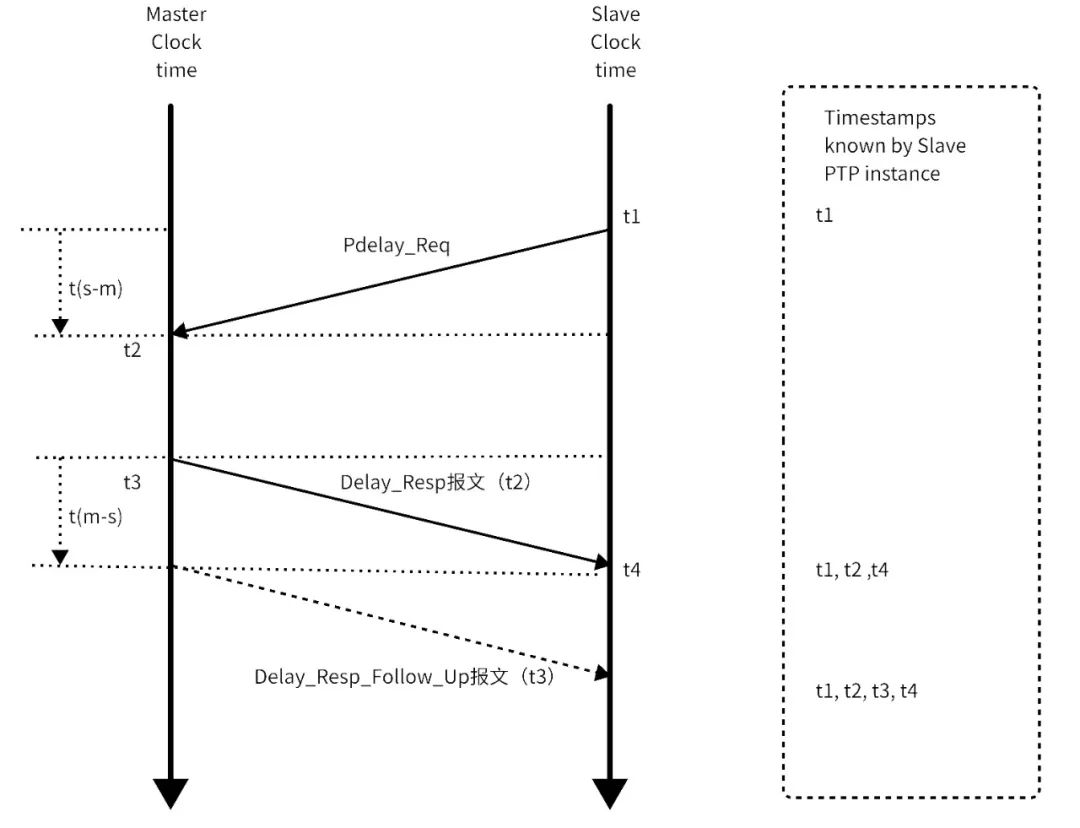
CAN time synchronization relies on periodic messaging and timestamp mechanisms, achieving approximately microsecond-level precision. It is mainly used in distributed control within vehicle electronics and industrial fieldbus networks.
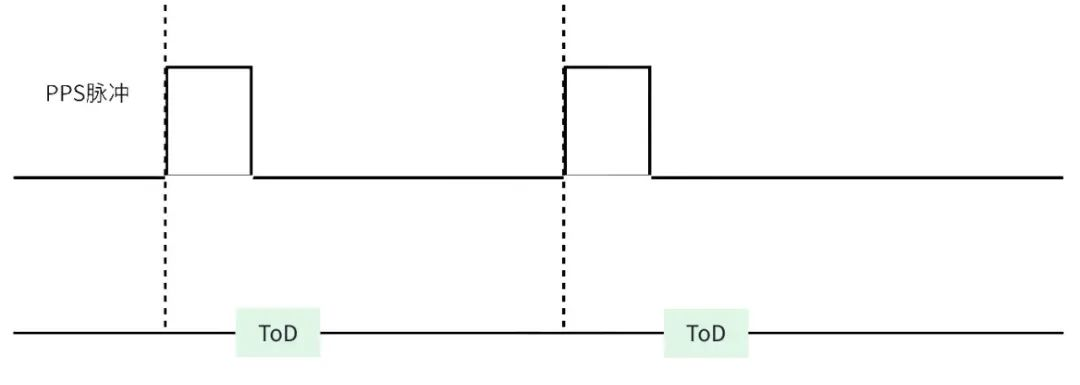
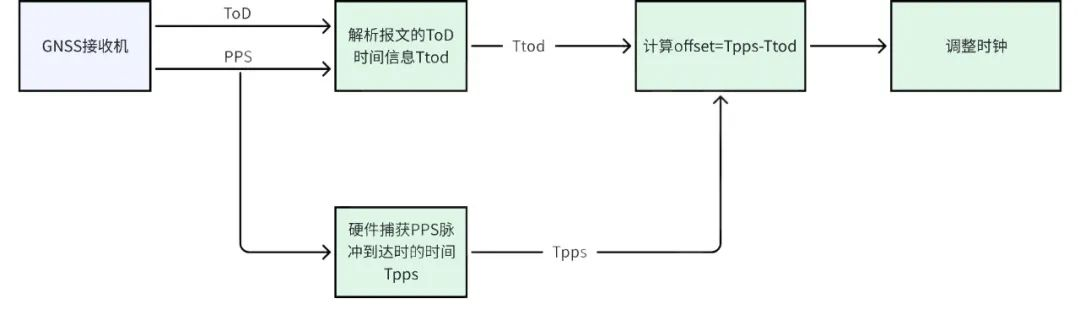
ToD/PPS synchronization combines Time of Day and Pulse Per Second for high-precision synchronization, widely used in financial systems and telecommunications.
NTP operates at the application layer, implementing time synchronization through a client-server architecture. Its hierarchical structure determines the precision of time sources, with local networks achieving synchronization precision of up to 5 ms.
Evaluating Time Synchronization Technology
Key measurement criteria for evaluating time synchronization technologies include precision, stability, reliability, and efficiency. Specific metrics such as time offset, synchronization accuracy, clock drift, jitter, synchronization time, holdover time, and resistance to interference are critical for determining the effectiveness of synchronization solutions in various scenarios, such as smart vehicles and industrial control.
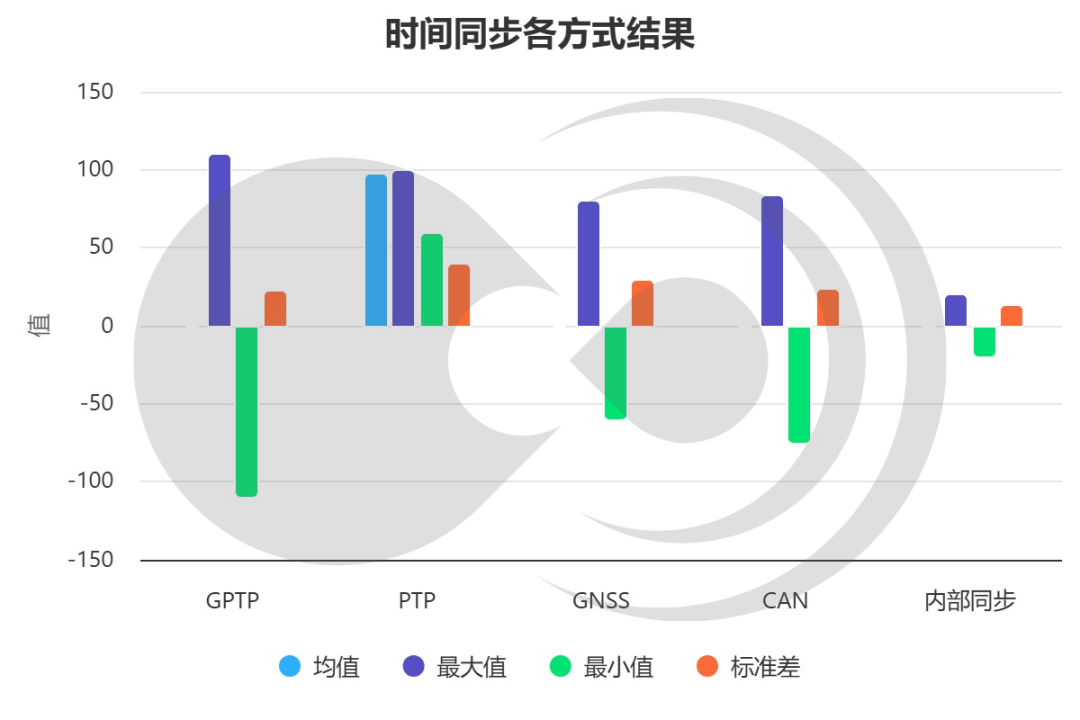
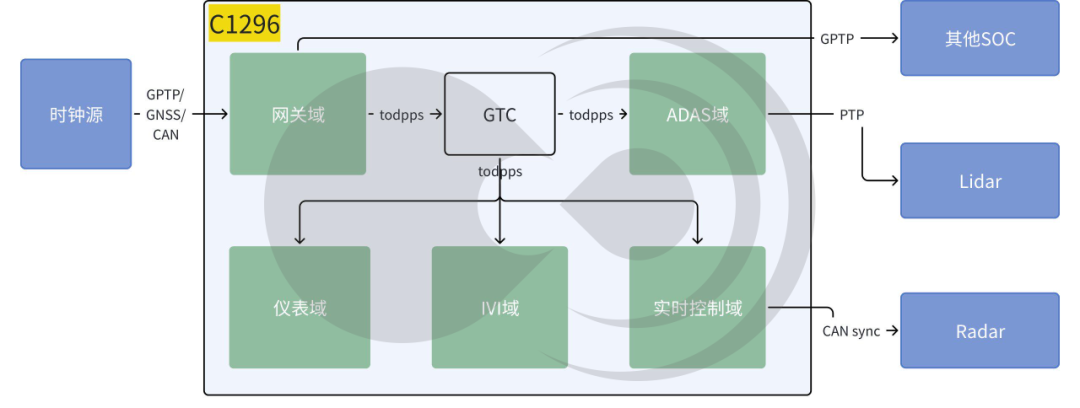
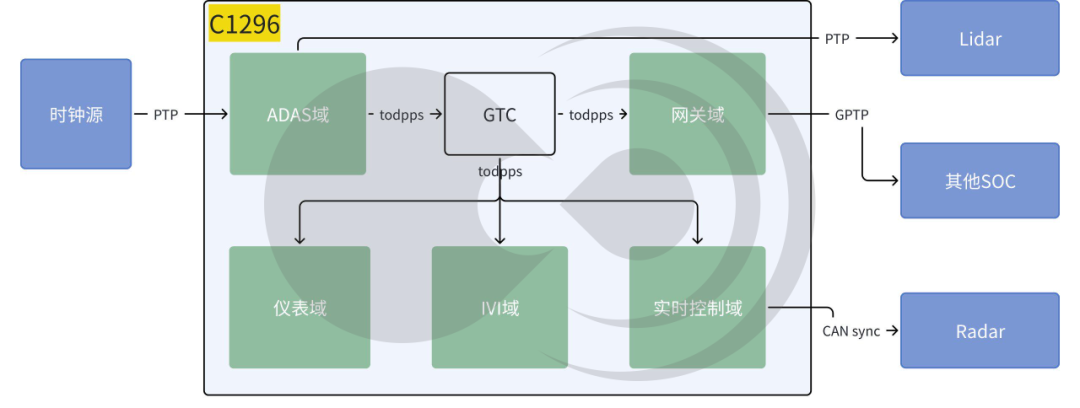
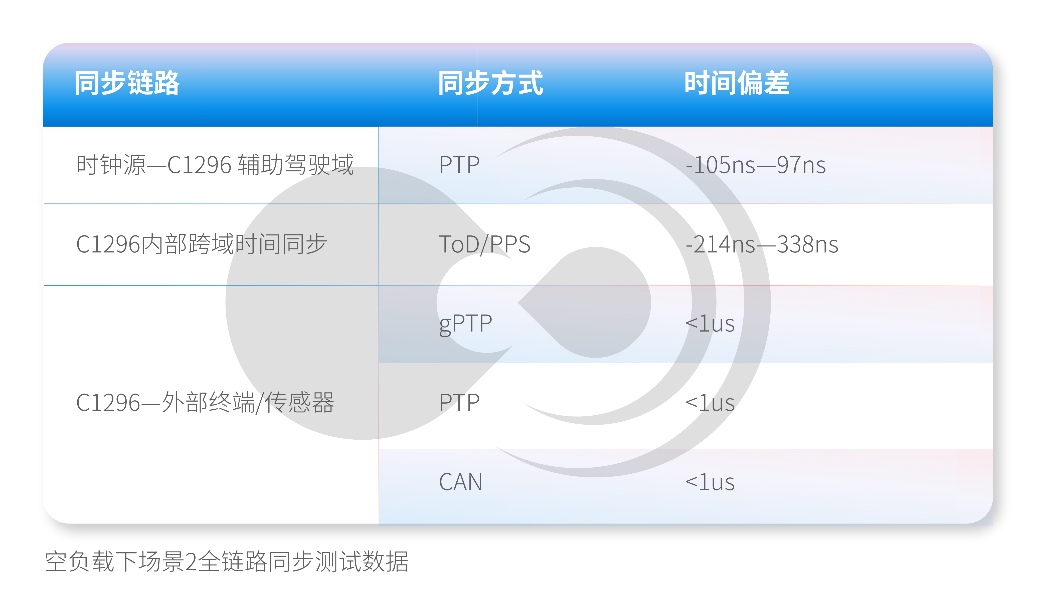
Practical Testing of Cross-Domain Time Synchronization with C1296
The Hezhisima Intelligent Wudang C1296 chip contains multiple subsystems, including ADAS, IVI, functional safety, real-time control, gateway, and instrument domains. The chip supports various synchronization methods, achieving sub-microsecond-level high-precision time synchronization. The C1296 chip can also synchronize to external clock sources, providing timing for lidar or other processors. The testing demonstrated that the C1296 chip can effectively synchronize time across different domains, ensuring high precision and eliminating clock trust gaps.
Cross-Domain Time Synchronization Technology in Smart Vehicles
Images




Share this post on: